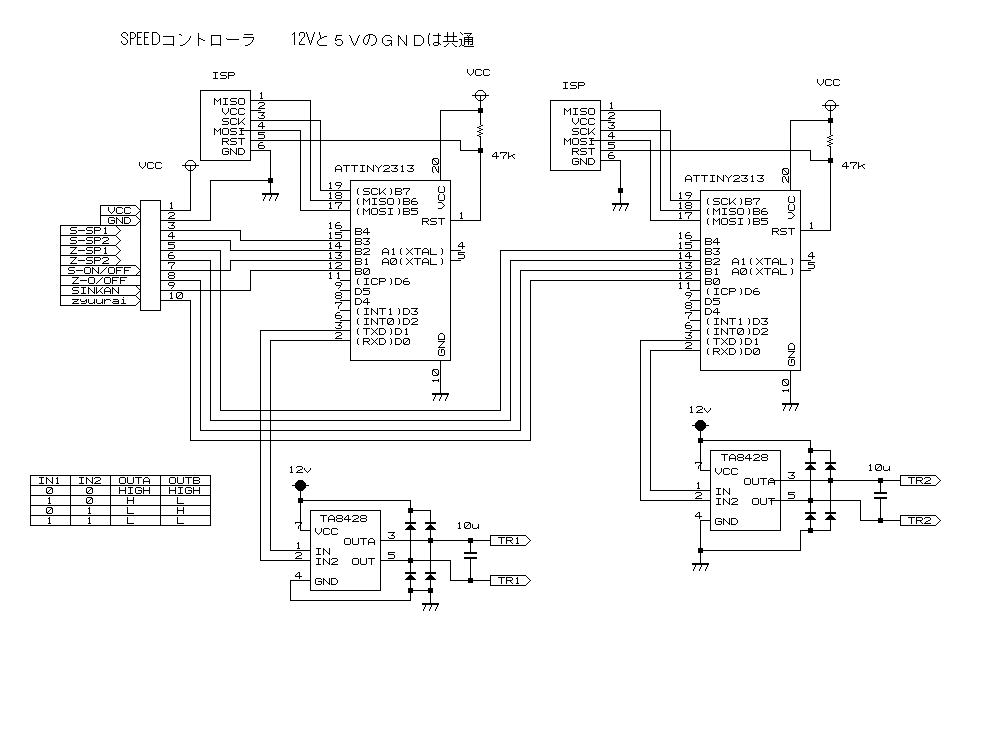


スピードを4段階にするため マイコンを変更した。
ATiny13Aはスピードが2段階しかコントロールできないので、i/oをもっと増やすことにする
ATiny2313を2個組み込んだ新基板である。新幹線用と在来線用に分けている。
PWM制御基板だけで動かすため、簡易SWをつけて、プログラムの調整をしている
PB0ーーー> 正、逆切り替え
PB3−−−> FAST SLOW 切り替え
PB4−−−> スタート ストップ
制御方法は、H、Lのパルス制御でスピードをコントロールする
以下 アセンブラのプログラムである
C言語で 正確にパルス制御できないわけではないが、
アセンブラの方が簡単なので、下記に製作する
スローは ON-10us ,OFF- 1ms
FAST ON-10us , OFF-600uS (検討中)
とりあえず、新幹線、在来線で多少OFFタイムは変えているが ロクハン、天賞堂ともに動作した
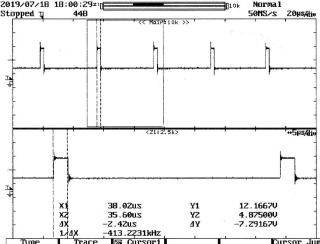
1出力に10uFのコンデンサを付けて平滑させている画像である
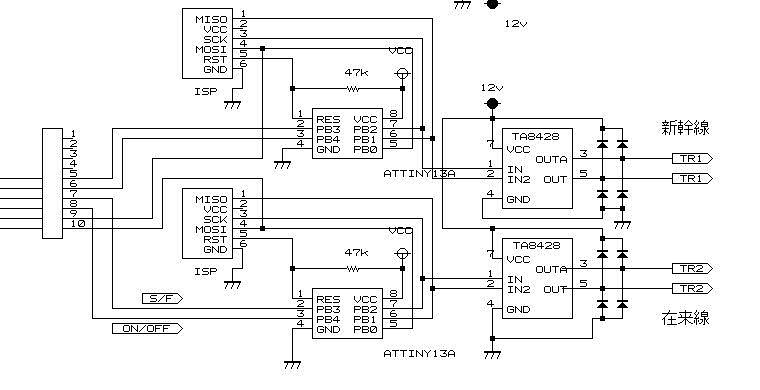
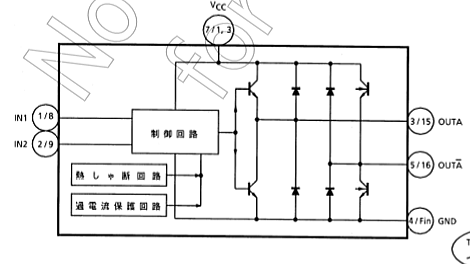
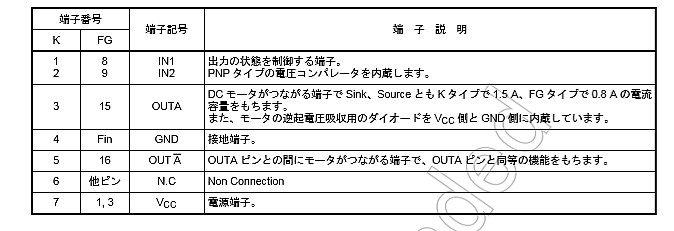
IN1,IN2に5VのH,L信号でOUTAにプラスマイナス12Vを出力することができる
マイコン ATiny13Aという小さいAVRを使用することにしてみた
IO端子が少ないので、メインマイコンから、スピードコントロールする、
HiGH,LOW程度の2段階コントロールにした。
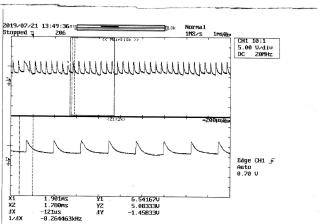
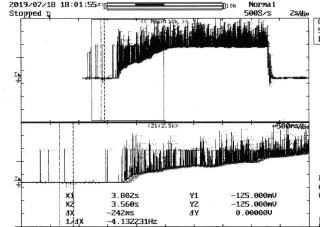
オシロスコープで測定してみると 25kHzで発振させ、DCに変換している。
スピードボリュームを上げると電圧が12V近くまで変化する


回路を作る前に、定低電圧電源で駆動させてみよう。
問題なく動作することが分かったので、どのように電圧制御するか考えることにした。
PWM スピードコントロール 設計概要
ロクハンのコントローラーがデアゴに付いてきた。
電車は単純に12VのDCモーターを搭載しているだけなので、電圧を加えればよいだけである
天賞堂の機関車もDCモーターなのでロクハンのコントローラーで動作する。