![]()
![]()
30年も経過すると、実際の方向と指針方位がズレてしまうのである。
0度〜180度まで 動かすと 10度位ズレてしまうのである、 後ろに補正用のVRがついているが、どうやっても補正が効かない
HFアンテナでは さほど気になることではないが、 430Mhz 2列2段でビームが切れるようになると1〜5度で始終微調整している。
ボタンは横押し式が多いが、微妙に動かす時は、下押し式でないとNGである。
写真は 1200FXのコントローラーである。
こんなボタンは使えないので リモート端子から タクトスイッチにして微妙に押すようにしている
今回、コントローラーを作るにあたり、オークションで中古品を探した。
小型で、ボタンが下押し式であること、
見つけたのはダイワのコントローラーである、マイコン基板が入りそうだ、
ー−−−−−−−−−−−−−−−−−−
コントローラーを自作する前に、原理を解析してみよう。


ローテーターは 本体(メカ)は江本の1200FXを使っている
これで、約100kgのアンテナを回している。
生産されたのは、今から40年も前のもので、当時はマイコンが無かった時代なので、OPアンプ回路で工夫されていた
詳細な回路図はないが原理は下記のようになっている。
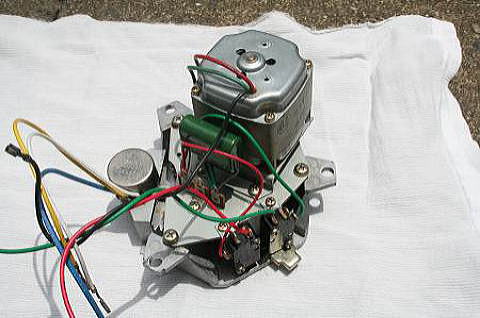
この写真は105のもので100Vモーターで駆動させている、1200FXは 24Vモーターで駆動されている。
100Vモーターはスピードコントロールはできない。方角は結構ラフである。
大型のアンテナを回すときは、スピード調整が必要である。
右は、コントローラー内部(メーター部)である
概要ー−−−ー−−−−−−−−−−−−−−
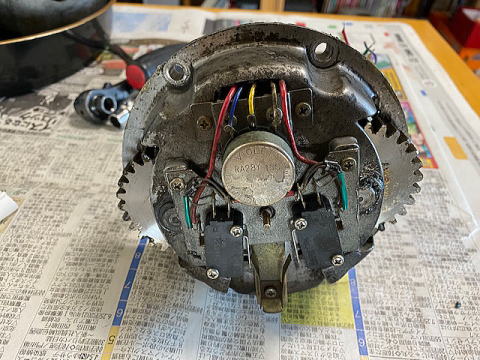
ローテーター本体が回転すると ギヤーに連動して VRが回転して 抵抗値が変わる
この回転抵抗器に電圧を加えると 回転角度で電圧が変化する。600Ωのポテンションメーターである
右回転と左回転は 電圧のプラスとマイナスをリレーで切り替えている。
メカ部には、マイクロスイッチが2個ついており、右回転MAXになると、マイクロスイッチが働き、モーターへの電源を切る
一方、マイクロスイッチで右回転方向は切られるが左回転方向にはダイオードにて通電可能状態なので、
逆電圧がかかると、左回転が始まる
ー−−−−−−−−−
コントローラー部では、
メカ部からの抵抗値(方位)を電圧に変換して OPアンプで比較して差動でメーター表示をさせる
メーター(方位指針)部にも VR(半固定抵抗)ががギヤーと連動して指針の方位によって抵抗が変わる
これを電圧に変える。
オペアンプで メカ部とメーター部の半固定抵抗に差を比較しながら、メカの方位とメーター方位を合わせているのである。
当時としては工夫された回路であるが 0度〜360度回すと 補正VRはついているが、10度位はズレてしまう。
HFやる人は、ほとんど気にしなくても良い方位誤差である。
![]()
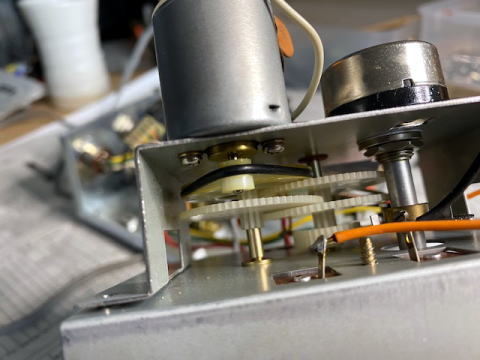
1200FXの内部は 数十年使うと グリスでギヤーが固着しているので、パーツクリーナ、CRCで きれいにしておく。
組み立ての注意は 600Ωの可変抵抗を300Ωにセットして、突起部を180度にしてセットするy

モーターは LOWスピードで12V HIGHスピードで 24V位で回転する。
モーター正逆コントローラー TA8428 を使える
このICは 電源 30Vまで 加えることができ、通常1.5A ピーク 3A 流せる
ローテーターは起動で ピーク1.5A 通常 0.8Aなので 十分コントロールできる。
テスト的に12Vのスイッチング電源で動かしてみたら、ゆっくりと正逆回転した。
ー−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
次は 方位検知である
エモテータ 1200FXは 0〜375度回転する。
抵抗値は 18Ω〜557Ωであった。
エモーテータのVR600Ωに 5V電圧を加えてマイコンでAD変換することで、方位(回転角度)を計算することができる。
AVRのAD変換ビットは0〜1024ビットである
ー−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
設計してみよう、図面を書いて 後は製作しながら修正していく
ローテータメカ部のコントロールは、 デバッグ用にLCD表示器がほしいので、I/Oポートが多いATMega1284を使用する
モーターのCW CCWは TA8428 制御ICである。リレー切り替えにしないのは、
これは、マイコンで CW CCWを制御できる ブレーキもかける事ができる。簡単に正逆回転できる。
通常 1.5A ピーク3Aまで制御できる。放熱フィンは必ず付けておきたい、
余談であるが、
電気メーカーの電気設計者でさえ、0.8Aしか流れない回路に3A流せるTRを使ってなんで破損するの?と聞いてきた。
最近のメーカー設計者はノウハウが無いのである。
電源は スイッチング電源でもよいのだが、電圧を15V〜20Vまで 変化させて モータースピードを変化させたい。、
シートLEDの光量と指針モーターのスピードもあるので、アナログトランスを使った。
LM338 3端子レギュレータは 10A以上流せる 制御ICである
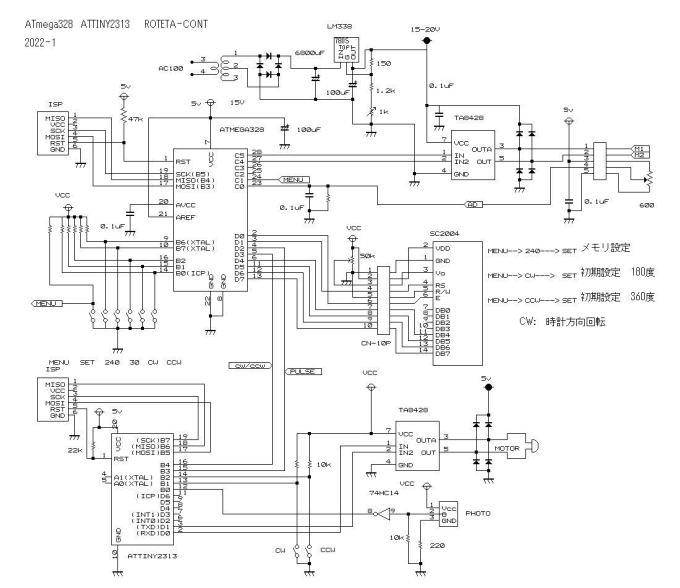
回路図は実験回路である
マイコン2個使ってそれぞれのモーターをコントロールしているが、
1個のマイコンで制御できるかは、プログラムスピード次第である。
![]()
ローテータコントローラの指針
方位表示で簡単なのは LCDにより 表示させるだけなら簡単である
0度〜375度まで本体は回転するので、計算して表示させればよい、 表示器を作っておられる無線局の方もいる
本体を 0度(真北)に向けて設置する人は少ないと思われる、関東に住んでいれば、東(約90度)に 本体の0度を設定する。
そうしないと、 新潟方面から仙台方向に向けるとき、360度回転させなければならなくなるからである
ローテーターの設置起点に合わせて、デジタル表示をプラスマイナスしてやる。
デジタル時計よりアナログ時計がわかりやすいと言う人がいるが、私自身も アナログ時計派である
ローテーターの方位も デジタルより、アナログ指針が見やすい。
そこで、コントローラーの表示もアナログ指針にする
原理は実に同じである。
位置はギヤーに連動した可変抵抗器の 抵抗値(電位)を方位変換して指針を回転させている
ギヤーに連動したフォトカプラやホール素子で パルスカウントして指針を回転させる方法もあるが、この方式は今回はやめた
理由は、電源を切った時、カウント数を記憶しておかなければならない、またはRAMを搭載してバックアップが必要になる
最後は、本体の方向と指針のずれをプログラムで補正すればよい。
ー−−−−−−−−−−−−−−−−−−−−−
指針モーターは TA8428 の制御ICを使う。
基本的には 本体メカのコントロールと同じになる。
ネットで写真の中古コントローラー部を入手した。
これが気に入ったのは CCW、CW レバーが押しやすい構造で 本体が小型だからである。エモテータや他メーカーのコントローラーはプッシュ式が多い
やはり、レバーは下に押すのが操作しやすい。
HFをやっている場合はさほど動かす事がないので、市販のコントローラーの左右スイッチで問題はないが、
430MhzのDXの場合は1度づつ、微妙に常時左右に動かしているので、
手元に置いて指を当てて常時操作するので、小型で押しやすいレバーが必要なのである。



中古品なので、内部のメカは壊れていた。破損していた樹脂ギヤーを交換した。アマゾンで樹脂ギヤーセットが売っていたので購入し交換した。
接触不良のレバースイッチは分解清掃した。
可変抵抗500Ωは 通常はストッパー無しを使うのがよいはずなのだが、ストッパー有りタイプが使われていた。
当然、ズレるとロックしてギヤーが破損してしまう。あまり良い設計ではない。 エモテータのVRは 全部ストッパー無しが使われている。
エモテータ についていた 可変抵抗器600Ωに変えた、
これは、「ストッパー無し」なので、いくら回転させてもロックしないので、ギヤーは破損しない。
エモテータのVRは特注で ストッパー無しの入手は困難なので、作り方を下記に記載しておこう
RAシリーズのポテンションメータを入手する
Cリングを外す 裏蓋を 外す




シャフトのストッパー部は樹脂なので、のこぎり(ピラニア鋸)でカットする
。
回転する時の段差は 0.8mmのマイラー樹脂板をアロンアルファ接着剤で貼り付ければ、段差が無くなるので、360度回転するようになる。
基本的には、30Ω〜500Ωの範囲で動くので、ストッパーがあっても問題ないはずなのだが、
万が一を考慮している。
![]()
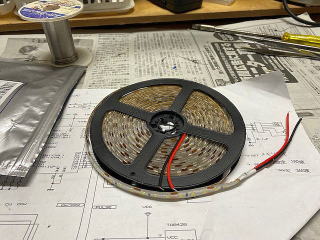
バックライトで明るくする

昨今はシートLEDがある。リールで1000円ほどで売っている。
ハサミでカットして使う
5cmほどの長さで 4列にした。 電圧は 9〜12V 好きな電圧を加える。


![]()
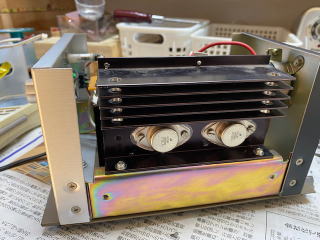
電源の製作
スイッチング電源 24Vを購入して、スピードコントロールは モータードライバーICをパルス制御(PWM)という方法もある
アナログリニア電源にしてしまった。どちらで制御するかは、個人の趣味である。
15V〜20Vまで変化できる。
電源は もう一つ 7〜12Vの電源も出力する。
コントローラーのモーターを回す電源とバック照明LEDの電源である。電圧調整できないと、指針モーターのスピードをコントロールできない


![]()


コントロールパネルには プッシュボタンを3個付けた。
3か所の方位を記憶しておく、フラッシュメモリなので、電源を切っても記憶している。
個人的に、富士山方向、ヨーロッパ方向、仙台方向 3か所設定する。 ボタンを押しっぱなしする手間を省いている、
これは便利だ
プログラムは 下記になる
//---------- EEPROM 読み出し -------------
void read_rom(void)
{
eeprom_busy_wait(); houi_seth=eeprom_read_word((uint16_t*)MP1);
eeprom_busy_wait(); houi_set1=eeprom_read_word((uint16_t*)MP3);
eeprom_busy_wait(); houi_set2=eeprom_read_word((uint16_t*)MP5);
}
![]()
AVRマイコンのAD変換は以外に簡単である
// ---------- ADC ------------------------
void ADC_IN (void)
{
ADCSRA |= _BV(ADSC); //変換開始要ループ内
loop_until_bit_is_set(ADCSRA,ADIF);
//変換終了時ADIFがセットされる
// a = ADC; //AD変換結果 10bit:0-1024
adc_dat = ADC; //AD変換結果 4bitシフト= 6bit:0-64
houi_dat = (ADC-27)/2.5;
}
-----------------
抵抗600Ωに加えた5V電源をAD変換すると
adc_dat は 0〜1024ビットになる
これを方位に直すと時は 2.5で割り算する
ADC/2.5
-27 は 0度の時の抵抗値18Ω位あるので、補正している
0度〜360度まで回転させても誤差はほとんどないので このデータで指針を回すことでOK
誤差はほとんどなくなる。しかし、指針メカのガタ分とストップ誤差は発生する

マイコン基板を小型のコントローラーに押し込んだ。
ー−−−−−−−−−−−−−−−−−−−−−−−−−−
メカからのデータ 1024ビットを 受信して 指針側のコンピュータが現在の指針位置を検出して
比較する。
データが一致したら、ストップする
while(houi_dat > dat_meca){M_CW;LED_GON;
ADC_IN();DATA_IN();
if(k_stop){set_buf=0;break;}
}
while(houi_dat < dat_meca){M_CCW;LED_RON;
ADC_IN();DATA_IN();
if(k_stop){set_buf=0;break;}
}
if(houi_dat == dat_meca){M_STOP;set_buf=0;
LED_ROFF; LED_GOFF;}
データは方位360度で制御しても良いが、荒くなるので、1024ビットで 細かく比較している。
この方が、メカの動きに正確に指針が追随してくれる。
ー−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
後は、本体をタワー(東方向を起点(0度)にしてセットする。
指針もセットした方向に合わせる。
![]()
これで、360度メカを回転させて、コンパスでアンテナの向きと指針を比較したら、ズレは1〜2度程度におさまった。
30年間、10度位正確な位置とズレた方向でやってきたが、今度は正確だ。
CW、CCWスイッチも微妙に動かす事ができる。
方位も3か所記憶できるので、よく使う方位に自動で合わせる事ができる。
スイッチをつければ、いくつでもダイレクトスイッチは作れるが、そんなに実用では必要ないだろう。

IC9700の横に置いて操作している
![]()