![]()
![]()


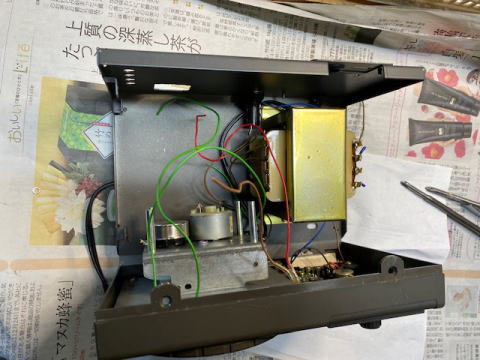
1200FXのコントローラーの欠点は ボタンが押しにくい事である。
このコントローラーは 中古で手に入れた ケンプロのKR-800用のコントローラーだ、ボタンは押しやすい。
このコントローラーにマイコンを組み込んでみよう
このケンプロコントローラーは見やすいのでで エモテータ1200FXを動かそう。
![]()
まず、分解して修理から始める。中古品は大抵壊れているから、、、、
中の基板類は使わないので外す。
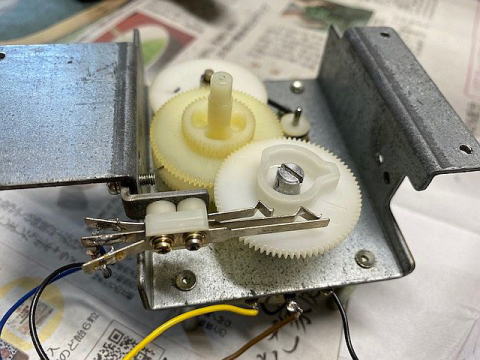
メーターの回転がおかしいのは 樹脂ギヤーが割れていたからだ。
500ΩのVR抵抗が重くなって 割れたのが原因であった

ポテンションメーター(VR)は新品に交換した、ストッパー機構は無しにして360度以上回るようにしておく
これで、ギヤーが破損することはなくなる。(加工方法は マイコンローテータ製作を参照)
このローテータは 450度回転する。ポテンションメータは約330度位回る
ー--------------ー-------------
ジュラコンギヤーの割れの修理方法を記載しておこう、
(知っている人は少ないから、、、アロンアルファはNGである)
瞬間接着剤(ポリアセタール用) ヘンケルの401などを使う
ただし、このまま塗布しても接着が弱い。
瞬間接着剤用のプライマー(タミヤ模型のプライマーなど)を塗布する。
そして、数分乾燥させる(乾燥していないとNG)
その後、401を塗布して接着する。
ー---------------------------
筆者は ポテンションメーターのシャフトに穴を開け3mmのタップを切ってビスで樹脂ギヤーを固定した
樹脂ギヤーのいもビス側のネジでシャフトを固定するのは、樹脂が割れているのでやめた。
後はギヤーのかみ合いを調整して、組み立てる。

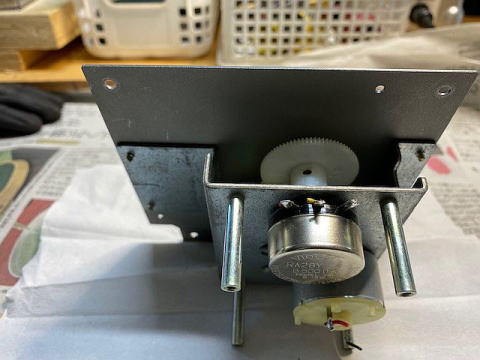
電圧を 5~8V加えると 指針が回転して ポテンションメーターは 100~480Ωの範囲で450度回転する。
エモテータは375度だが、ケンプロは450度も回転する。
メカとメーターのAD変換のズレの対応が必要だろう。
メカ側のポテンションメータに抵抗を入れて電圧調整が必要だろう。
![]()
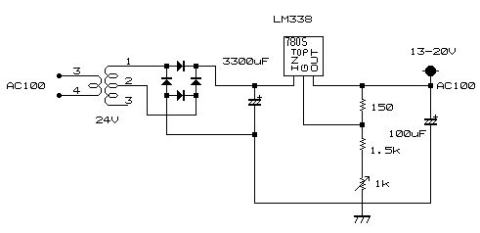
まず、電源から作る
電源トランスはそのまま流用する。
LM338K でトランス から ローテータ用 13V~20Vまで変化する電源を作る LM338Kは 5A以上流せる。
LM317 でメータのモータとLED照明の 8V~12Vまで変化する電源を作り出す LM317は 1.5A程度流せる
マイコン5Vは 3端子7805を使う。
本体のアルミ放熱板にLM317,,LM338を取り付ける。
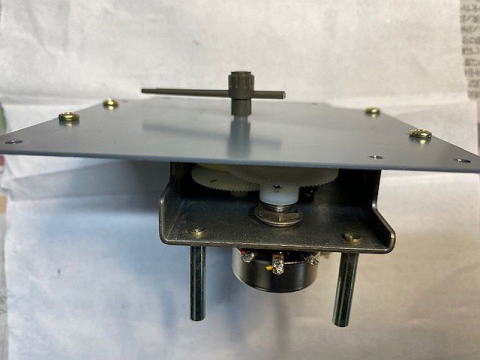
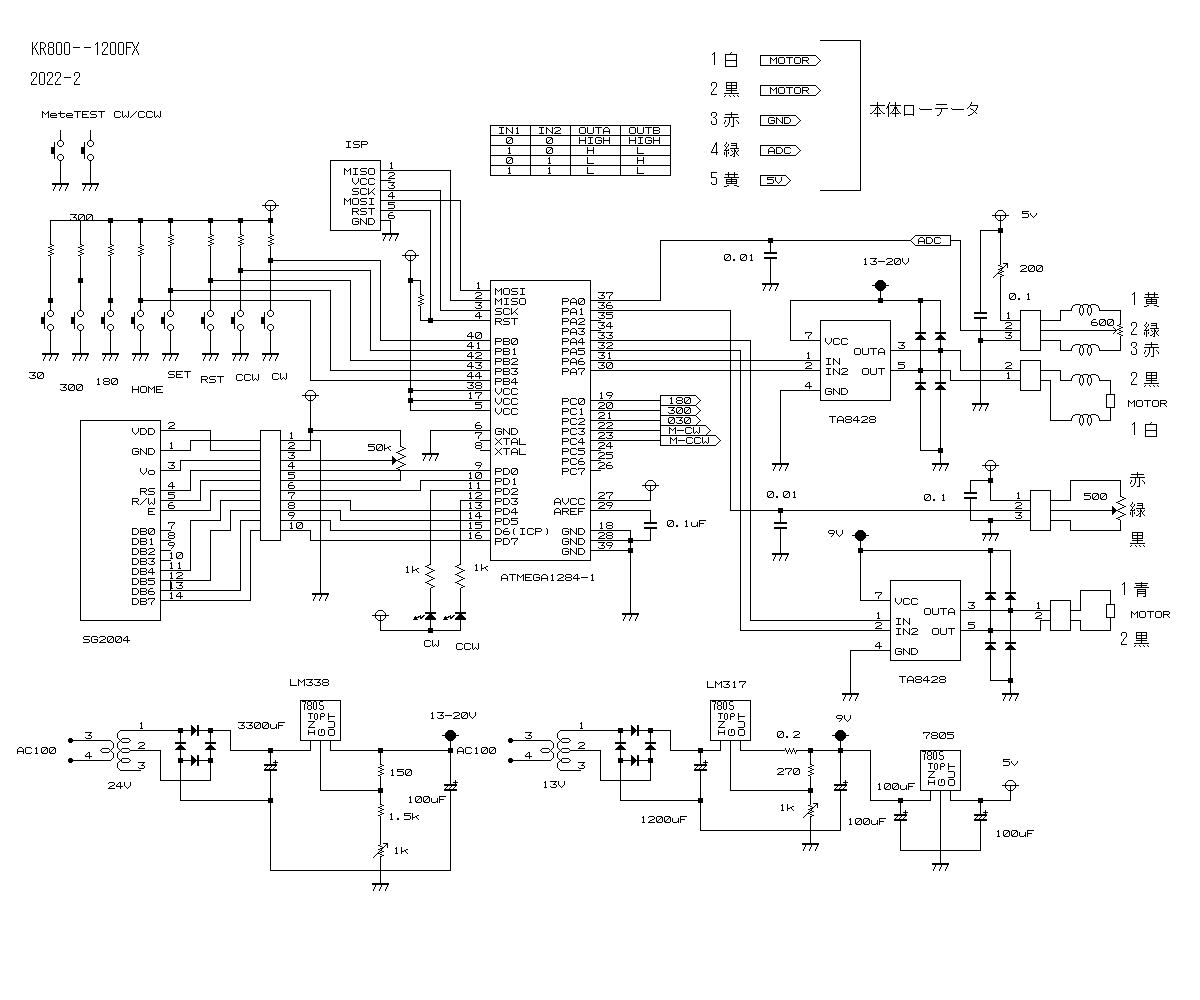
本体の回路を考えてみよう
メータモータのVRと 本体ローテータのVRの値を AD変換する。試作品は マイコン2個使って別々にコントロールしていたが、
マイコン1個で AD変換ポートをソフトで切り替えて取得する。


KR-800の上部の部分は基板を取り付けるには 格好の場所であった。
表示器は必要ないが、デバッグ用に取り付けている
シートLEDで照らすと高級感があるメータになる。 CW、CCWボタンで ローテータは回転をした、スピードコントロールも可能になった。
実際のCW,CCW とメモリスイッチは リモート配線で 手元でコントロールしている
![]()
AD変換の切り替えプログラムである。
分周比 ck/64 にした 読み取り時間は 104uS である
ー-----------------------------
ADCSRA = 0b10000110;
// ADEN,ADSC,ADATE,ADIF,ADIE,ADPS2,ADPS1,ADPS0
// ADEN許可:1 ADSC開始:0 ADATE自動起動:0 ADIF完了割込:0
// ADIE割込許可:0 分周ck/64 読み取り時間 104uS
ADCSRB = 0x00;
// 連続変換動作 =0
// ---------- ADC -------CH0-----------------
void ADC_IN (void)
{
ADMUX = 0x40; //CH0
//AVCC基準電圧、入力PA0 0100-0000 データ右揃え
ADCSRA |= _BV(ADSC); //変換開始要ループ内
loop_until_bit_is_set(ADCSRA,ADIF);
//変換終了時ADIFがセットされる
// a = ADC; //AD変換結果 10bit:0-1024
meca_dat = ADC; //AD変換結果 4bitシフト= 6bit:0-64
}
// ---------- Meter ADC ----CH1--------------------
void METER_IN (void)
{
ADMUX = 0x41; //CH1
//AVCC基準電圧、入力PA0 0100-0000 データ右揃え
ADCSRA |= _BV(ADSC); //変換開始要ループ内
loop_until_bit_is_set(ADCSRA,ADIF);
//変換終了時ADIFがセットされる
// a = ADC; //AD変換結果 10bit:0-1024
houi_dat = ADC; //半分
}
![]()

1200FXコントローラーは KR800の外観を使ったコントローラーに変わった。
回転スピードは 低速モードで 約13V 高速モードで20V
プリセットメモリーは 4か所にした。
プログラムの改善点は下記になる。
// ローテーターコントローラー 1マイコンにする
// ATmega1284p ADCのコントロールは 2ポートにする。
//
// KR-800 は 0~450度メータ 1.2倍になる、 エモテータ本体は0~375度
//回路的に 電圧を合わせる
//
// メータモータ電圧 5Vにして精度アップを図ったため、
// CW/CCWスイッチ離してから メカとメータ指針が一致するまで、回転持続が必要になる
// -------------------------------------------------
// ATmega1284 内部 Xtal =8MHz L=E2 H=DF
//
// 内部クロック 8MHz ADC分周 64 読み取りタイム 104uS
ー--------------------------
プログラムで工夫しているところは、ローテータの回転スピードよりもメータの方を多少遅くしている。
早くしすぎると、メーターがカクカク動く、遅すぎると、アンテナが回りすぎる
適度にモータの電圧を調整することである
プログラムはローテータのCW,/CCWスイッチを切っても、メータは追随ししなければならない
//---------------------------------------------------
// 時計方向
while(k_cw){R_CW;LED_GON;start_buf=0;cw_buf=1;
ADC_IN(); //meca_dat
wait_ms(2);
METER_IN(); //houi_dat
if(meca_dat > houi_dat){M_CW;wait_ms(5);}
if(meca_dat <= houi_dat){M_BREKE;cw_buf=0;}
ADC_hyou();
}
while(cw_buf == 1){
METER_IN(); //houi_dat
if(meca_dat > houi_dat){M_CW;wait_ms(5);}
if(meca_dat <= houi_dat){M_BREKE;cw_buf=0;}
ADC_hyou();
}
![]()
クリエートのコントローラーの改造

クリエートのローテータも改造して作ってみた。
CCW-CW のスイッチとメモリースイッチはリモートで 手元で押すようにしている
これは失敗だった。
元々、クリエートは AC100vで ローテーターを回すため、精度が悪い
つまり、1度動かしたい時に 5度位惰性で動いてしまう。 HFアンテナでは気にならないが 1200、430Mhzで1度単位で
方向を動かすには、クリエートのローテーターは使えないのである
コントローラーの指針精度もそれなりで 精度が悪い
結局 クリエートのコントローラーは使い物にならなかった
が、風向計としてよみがえった。
風向計は20度単位で動くので、クリエートの精度でも問題なかった。
![]()