![]()
![]()
アンテナチューナーを半自動化する。


500Wのリニアに対応したHFアンテナチューナーである
チューナーを通したロスは意外に少ない
使用してみると、とても良い機種である。
数字のメモリは、3.5Mでは 89位、 14Mhzでは 120位
ローラーインダクタを数十回、回転させるため、周波数を切り替える場合、結構面倒である。
数字3桁もかなり「ラフ」なので、正確に合わせるには送信しないと合わせられない
コンデンサ側のダイヤルメモリも、かなりメモリが粗いので、正確に調整するのは難しい。
ローラーインダクタはモーターで回転させる事で、半自動化できる
コンデンサ側は バーニアダイヤルに変更することで、精度があがりそうだ。
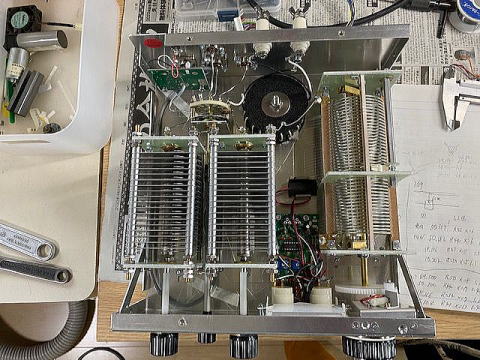
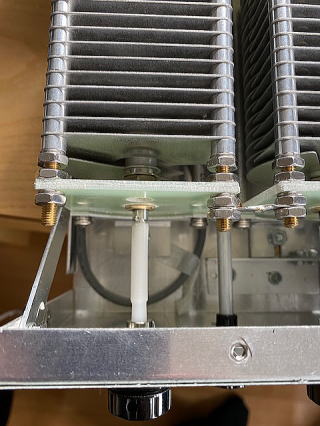
内部はこのようになっている。
設計思想
ローラーインダクタ部分は 樹脂ギヤーが付いている、これはメモリカウンタを回転させるものである
これを利用して、、
つまり、メモリを回転させる樹脂ギヤーをモーターで回転させてみよう。
モーターは低速のギヤー付きがよい ネットで売っている。
トルクは低いもの、、、なぜなら、モーターを使わずに手でまわしたときもまわるようにしたい
回転数を検知して、カウンターに変換する
数値を記憶しておけば、ボタンを押すことで、自動で その数値まで回転させる
コントローラーは、ダイレクトボタンにして、、例えば14Mhzのボタンを押すと、自動で、そのカウンタまで回転させる。
ダイレクトボタンは 7〜50M 5つ以上付けるればよいだろう。
LEDを付けて 押した周波数を点灯させる。電源を切るときは、eepromにメモリさせておく。
このような設計構想でスタートする。
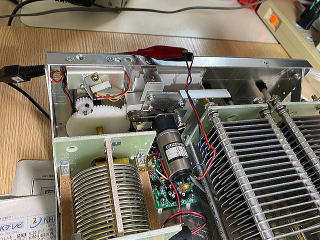



大きな樹脂ギヤーに小型の樹脂ギヤーをかみ合わせ、モーターはタイミングベルトでコンデンサとインダクタの間に
取り付けた。
アルミ板で取り付ける
このモーターの静止トルクは弱いので、手でローラーインダクタも回せる
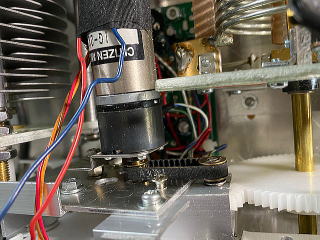
位置決めのため、モーターの軸にエンコーダーを取り付け、フォトカプラでカウントさせる
1回転1回のパルスで十分であった。
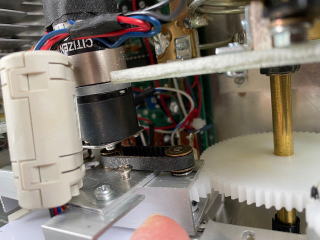
樹脂ギヤーをかみ合わせて、タイミングベルトでモーターを接続する
モーターはギヤーモーターなので、回転数は遅い
このモーターは12V用だけど、5Vで使用するとさらに遅くなるので良い
モーターのトルクは弱いので、手でつまみを回すと、モーターも動くので、便利である
-----------------------------
1)樹脂ギヤー
使えなくなった プリンターをバラバラにして 使えるギヤーを流用
2)ベアリングや ギヤーモーターは オモチャを分解して使う

ギヤーのかみ合わせは アルミ板のビスの調整で行う
エンコーダーは回転数が早いので、半円で使う(1回転 1パルス)
![]()


バリコンつまみは バーニアダイヤルに交換する。 コメットのCAT-300で成功しているので
こちらも、調整しやすい、バーニアダイヤルに36mmを購入した
ここで問題発生ーーーーーーーー
MFJ962Dの 作りが雑なのである、さすが、日本製ではない。
バリコンから出ているシャフトが偏芯している、バリコン自体の取り付けがラフなのである
そのまま、取り付けたら、回らなくなった。。。
製品が良ければ、そのまま取り付けられる。

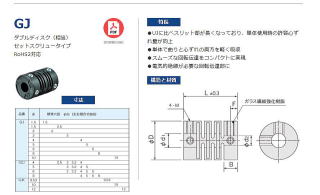
そこで、つかうのが、フレキシブルジョイントである
樹脂タイプは500円程度で販売されている


取り付け完了した。
新美精器 バーニアダイアルφ36mm180°は不良品だった
分解して修正した
??? 新品で購入したのに、動きが擦っている、動かない、、、初期不良品であった、
分解したら、接着剤でビスを固定してあった、外すのが大変だった、購入した3個は良品だった。
日本メーカーでも品質の悪いものもあるのだ、、、購入する人がいないから、仕方ない、、
これは、不良と知っていながら、接着剤で応急修理してあった、こんな修理ではNGだ、自分で修理する、、、
![]()
ここまでくれば、コントロール回路とプログラムである
回路はマイコン1個の簡単な回路で、言語は C言語なので、簡単である
![]()
ボタンは UP回転、DOWN回転
DOWNの初期にマイクロSWで スタートメモリを 「0」にする
後は、UP回転でカウントする
ローラーインダクタの端にマイクロSWを付けて、スタート地点を検出している。
ダイレクトSWを5個用意してあるので、 カウント数をメモリしておけば、 ダイレクトSWメモリと
現在のカウント数を比較して、UP−DOWN操作にする
必要なのは 電源を切ってもメモリしておく事
#define MP1 0x0000
#define MP2 0x0002
#define MP3 0x0004
#define MP4 0x0006
#define MP5 0x0008
#define MP6 0x0010
EEPROM のダイレクト設定をする
書込みと読み出しのプログラムは下記である。
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
void read_rom(void)
{
eeprom_busy_wait(); m1_count=eeprom_read_word((uint16_t*)MP1);
eeprom_busy_wait(); m2_count=eeprom_read_word((uint16_t*)MP2);
eeprom_busy_wait(); m3_count=eeprom_read_word((uint16_t*)MP3);
eeprom_busy_wait(); m4_count=eeprom_read_word((uint16_t*)MP4);
eeprom_busy_wait(); m5_count=eeprom_read_word((uint16_t*)MP5);
}
// ******* 書き込み 方法 *********************
void write_rom(void)
{
eeprom_busy_wait(); eeprom_write_word((uint16_t*)MP1,m1_count);
eeprom_busy_wait(); eeprom_write_word((uint16_t*)MP2,m2_count);
eeprom_busy_wait(); eeprom_write_word((uint16_t*)MP3,m3_count);
eeprom_busy_wait(); eeprom_write_word((uint16_t*)MP4,m4_count);
eeprom_busy_wait(); eeprom_write_word((uint16_t*)MP5,m5_count);
}
//
機能として忘れてはならない事は、電源を切っても、現在のカウンタメモリは記憶しておかなければならない。
電源を入れたら、ローラーインダクタの位置を思い出す必要がある
このカウンタもEEPROMに記憶させておくのである
アップ回転、ダウン回転ボタンを押して、ローラーインダクタをセットする、
バーニアダイヤルで メモリを合わせ、アンテナの共振点を合わせる。
![]()
4桁の大型の7セグLEDで表示させる
ダイレクトSWは 9個用意した 例えば 21.074/、21.200/、21.300 というように
インダクタを操作しないと調整できない場合の為に 多くしている


最初は アップとダウンSWローラーインダクタを回し アンテナアナライザで 周波数の共振点を見つける
左右のバリコンのバーニアダイヤルの数値は記録しておく。
ローラーインダクタの数値は ダイレクトスイッチに記憶させる。
電源を切っても、メモリは記憶されているので、数値は表示される。
MFJ926Dのメモリは 0〜125まで表示される(実際に使うのは 80〜120位である)
マイコンの7SEGLEDは 約1300まで表示される
10倍の精度で設定することができるようになった。
使用感ーーーーーーー
7Mhzで使っていて 14MHzに切り替えるのは 14Mボタンを押す
その後、バリコン側を メモ帳から 60、66 と合わせれば完了、、
簡単に変更可能になった。
モーターを付ける事による弊害(SWRなど)は今のところ見つかっていない。
無線機のアンテナチューナーを使えば、出力は落ちるが、簡単だろう。
200w機でも 150w程度しか出していないので、面倒な外付けはいらない、、、
これが、趣味の世界なのです。
骨董品の真空管無線機を使って、混信やノイズが大きい、、、って満足している人もいるから、、
![]()